![]()

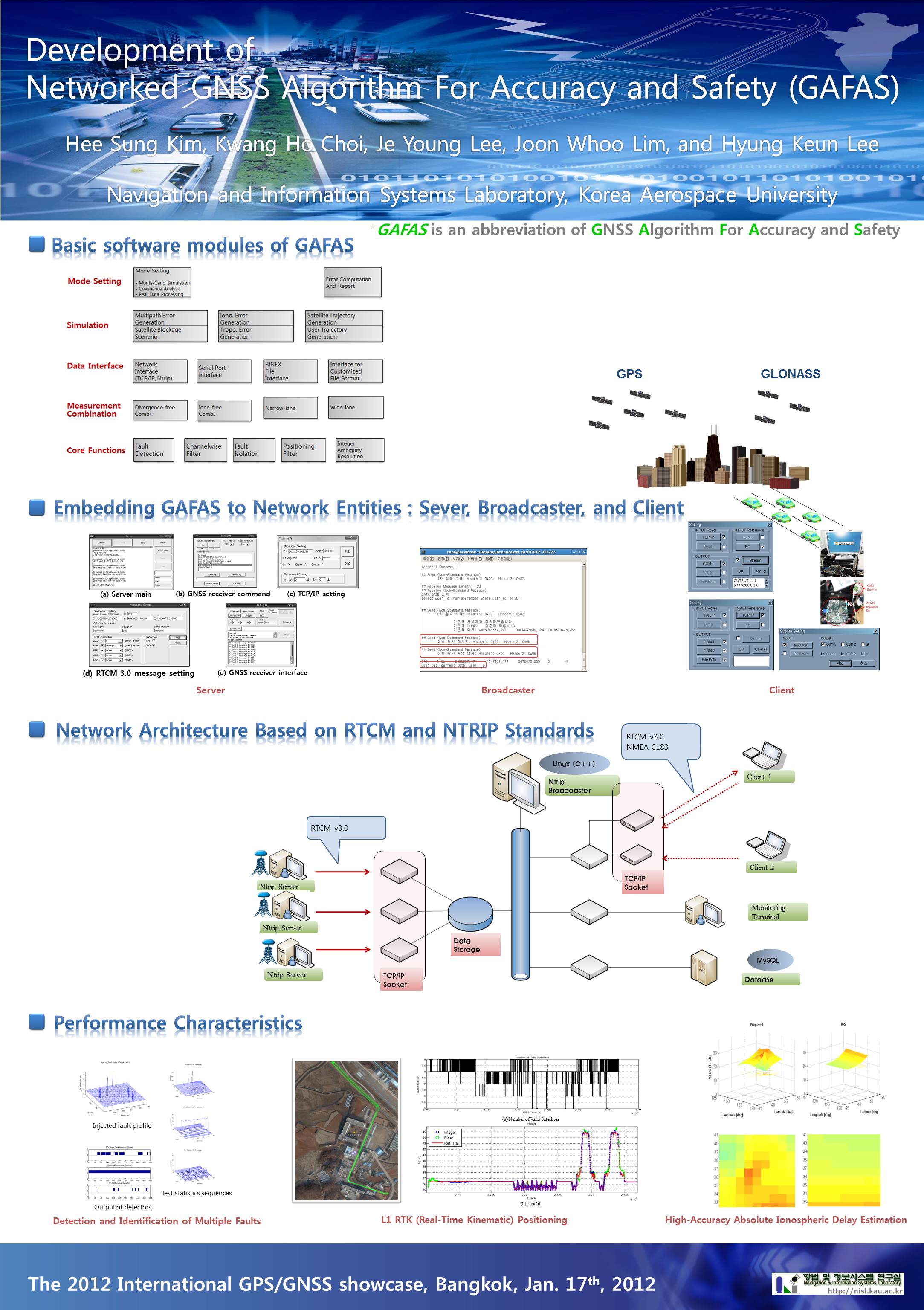
* Self-Developed C/C++ GNSS Software Package (GAFAS, NGAFAS)
GPS/GNSS Network RTK 기술에 기반한 Cm급 정밀 항법/궤적 추출 소프트웨어
(클릭 후 다운로드 가능, L1 RTK, RINEX 데이터 처리)
- 네크워크 RTK 인프라 기술의 국산화 + (실시간 데모 영상) 1 2 3 4 5 6
기존 상시관측소 변경 없이 활용 가능
|
|
|
|
|
|
Simulation and Real-Time Positioning Based on GPS/GLONASS Written in C-Language Accuracy, Availability, and Continuity Enhancement by Position-Domain Hatch Filtering Multiple Fault Detection, Isolation, and Reconfiguration even with Single-Frequency Receivers Inter-Ambiguity Resolution by Lambda Method Cm-Level L1 RTK Functionality Interfacing with Various Single- and Dual-Frequency Receivers from Trimble, Novatel, Septentrio, and U-blox Ntrip Customization (Sever, Broadcaster, Client) RTCM/NMEA Encoding/Decoding Capable of Constructing Distributed Real-Time GNSS Master Station Capble of High-Accuracy Ionospheric Map Generation in Real-Time |
|
* LIDAR(Light Detection and Ranging) Module
|
|
|
|
| |
|
Hokuyo UTM-30LX : 2 sets |
(https://www.hokuyo-aut.jp) |

* Vision Sensor Module
|
|
|
|
| |
|
Bumblebee XB3 Stereo Vision Sensor : 1 set |
(https://www.ptgrey.com) |
|
Cusomized Vision Sensors |
|

* Receiver Modules based on Software Defined Radio (SDR)
|
|
|
|
| |
|
Ifen SX3 GNSS Software Receiver : 1 set |
(http://www.ifen.com) |
|
Ettus USRP (Universal Software Radio Peripheral) : 2 sets |
(http://www.ettus.com) |


* Dual-Frequency Reference GNSS Receivers
|
|
|
|
|
|
|
Trimble : 1 set |
(http://www.trimble.com) |
|
Novatel : 3 sets |
(http://www.novatel.com) |
|
Septentrio : 2 sets |
(http://www.septentrio.com) |
|



* Multi-Channel GPS/SBAS Simulation System (http://www.spirentcom.com)
|
|
|
|
|
|
GPS L1 C/A code and SBAS generation wide dynamic capability in both Doppler and power level 12 independent signal channels High fidelity,accuracy,repeatability and dynamics Multiple vehicle types with comprehensive error effects Wide selection of pre-loaded test scenarios Capture receiver data simulation truth data in NMEA-0183 format |
|

* GPS1005 OpenSource GPS Receiver (http://www.gpscreations.com)
|
|
|
|
|
|
Raw GPS measurements (pseudorange, carrier phase, Doppler) OpenSource code RF Sensitivity: -135dBm for tracking 12 parallel channels L1 band (1575.42MHz) operation C/A code (1.023MHz chip rate) RF Sensitivity: -135dBm for tracking |
|
* SIGTEC GPS Receiver Firmware Development Kit (http://www.signav.com.au)
|
|
|
|
|
|
Evaluation KIT Development KIT ARM-based OEM Board Design KIT Chipsets |
|

* Trimble ACE III GPS Starter Kit (http://trl.trimble.com)
|
|
|
|
|
|
Raw GPS measurements (pseudorange, carrier phase, Doppler) L1 frequency, C/A code (SPS), 8-channel, 32 correlators Update rate : 1Hz |
|
* MI-A3350M Inertial Measurement Unit (http://www.m-inf.com)
|
|
|
|
|
|
Raw inertial measurements (angular rate/specific force) Yaw Maximum Angular Rate ± 60 °/sec Rate Resolution < 0.05 °/sec Range ± 180 ° or 0 ~ 360 ° Resolution (1 sigma) < 0.05 ° Static Drift < 40 °/hr Roll/Pitch Maximum Angular Rate ± 300 °/sec Rate Resolution 0.5 °/sec Range ± 180 °/± 90 ° Resolution (1 sigma) < 0.5 ° Static Error 2 ° Dynamic Error 3 ° |
|

* XSENS Miniature, Gyro-Enhanced Attitude and Heading Reference System (http://www.xsens.com)
|
|
|
|
|
|
Real-time computed attitude/heading and inertial dynamic data 360º orientation referenced by gravity and Earth Magnetic Field Integrated 3D gyroscopes, accelerometers and magnetometers On board DSP, running sensor fusion algorithm Gyroscopes enable high-frequency orientation tracking High update rate (120 Hz), inertial data processing at max 512 Hz Individually calibrated for temperature, 3D misalignment and sensor cross-sensitivity Accepts and generates synchronization pulses |
|

* Analog Device Tri-Axis Low Cost MEMS IMU + Magnetometer (http://www.analog.com)
|
|
|
|
|
|
Triaxial, digital gyroscope with digital range scaling ±75°/sec, ±150°/sec, ±300°/sec settings Triaxial, digital accelerometer, ±18 g Triaxial, digital magnetometer, ±2.5 gauss 220 ms start-up time 4 ms sleep mode recovery time Tight orthogonal alighment, <0.05° |
|

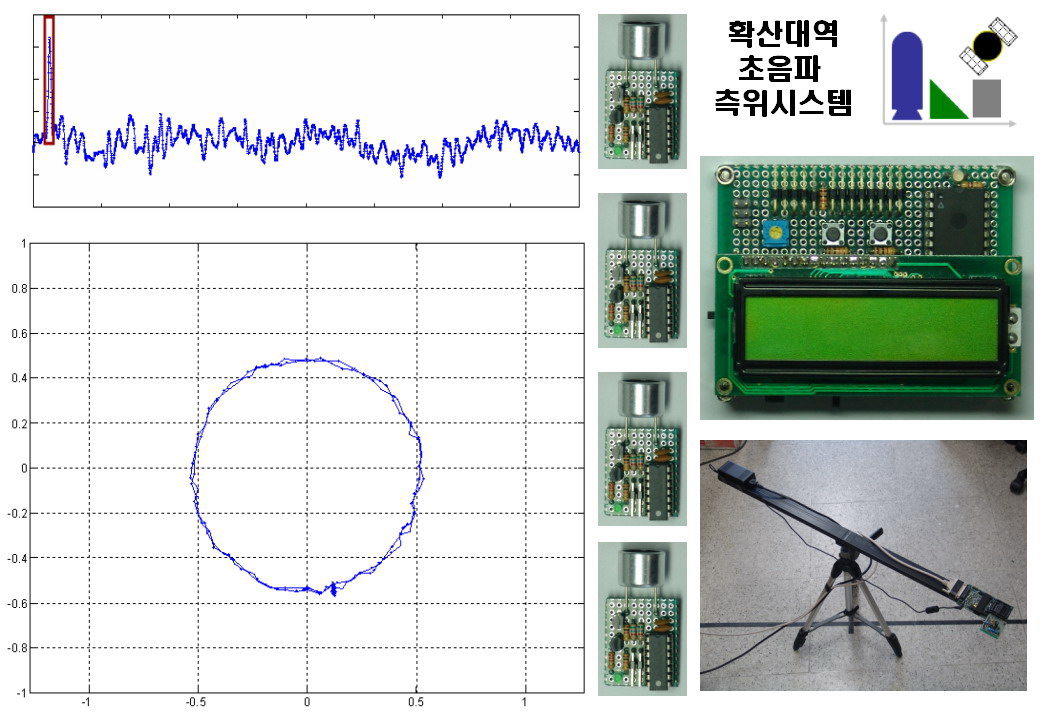
* Spread Spectrum Ultrasonic Location System (http://nisl.kau.ac.kr)
|
|
|
|
|
|
Prototype for Game Interface |
|
|
|
|
Copyright Navigation & Information Systems Laboratory (항법 및 정보시스템 연구실). All right Reserved. School of Electronics and Information Eng., Korea Aerospace University (한국항공대학교 항공전자정보공학부) 200-1 Hwajeondong Deogyanggu Goyangsi Gyeonggido Korea #412-791 Tel : +82-(02)300-0131, Fax : +82-(02)3158-5769, E-mail: hyknlee at kau dot ac dot kr
|
